自動誘導搬送車(AGV)は 現代の倉庫および製造施設を革新しています, 物資搬送における高い効率、安全性、およびスケーラビリティを実現します。従来のフォークリフトは多くの場合、熟練したオペレーターを必要とし、人的ミスが発生しやすいのに対し、AGVは 自律走行、精密な制御、そして連続運転を提供します.
eコマースと急速な物流の時代において、企業はますます フォークリフトAGV より迅速なフルフィルメント、スペースの効率的な活用、およびコスト削減への高まる需要に応えるために依存しています。本ガイドでは、 フォークリフトAGVの核心機能、制御システムのアーキテクチャ、ナビゲーション技術、および今後のトレンド について取り上げ、倉庫管理者、物流エンジニア、および運用計画担当者に、インテリジェントな物資搬送ソリューションをどのように導入すればよいかを明確に理解していただきます。
1. フォークリフトAGVの核心機能
1.1 フォークリフトAGVの基本モジュール
単輪駆動式のフォークリフトAGVは、いくつかの主要なモジュールで構成されています:
| モジュール | 機能 |
|---|---|
| レーザースキャナー | 反射板または環境の輪郭を用いたナビゲーションと位置決めを提供します |
| タッチスクリーン | バッテリー残量、運転モード、および警報を含む車両状態を表示します |
| 非常停止ボタン | 緊急時に車両を即座に停止させることで安全性を確保します |
| 車両コントローラー | 運動、操舵、姿勢を制御するコアシステム |
| 安全センサー | 障害物を検知し、自動的に速度を落としたり停止したりします |
| 安全バンパー | 壁、棚、および作業員との衝突を防止します |
| 荷重スイッチ | フォークリフトが荷物を積んでいるかどうかを検出し、自動運転を行います |
これらのモジュールにより、フォークリフトAGVは自律的に稼働し、繰り返しの作業を高い精度で実行し、 運用効率と安全性を向上させます 小規模から大規模の倉庫においてもです。
1.2 運用上の利点
-
連続運転: AGVは人間の介入を最小限に抑えながら、24時間365日稼働できます。
-
人件費の削減: 必要なオペレーターの数が少なくなり、スタッフはより付加価値の高い業務に専念できるようになります。
-
安全性の向上: 内蔵のセンサーや安全機構により、職場での事故が減少します。
-
一貫性と正確さ: 自動ナビゲーションにより、正確な物資搬送が保証され、製品の損傷が最小限に抑えられます。
2. フォークリフトAGVの制御システムアーキテクチャ
について 車両コントローラー はあらゆるAGVシステムの中枢であり、モーターやセンサー、通信モジュールの管理を担っています。すべてのデバイスと CANOPENや類似の産業用通信プロトコルを介して接続し、リアルタイム制御を確保します。
2.1 単輪駆動式フォークリフトのアーキテクチャ
単輪駆動式フォークリフトの場合:
-
ステアリングACモーター&ドライブ(ステアACD): ステアリング角度を制御し、エンコーダーを通じてフィードバックを提供します。
-
ドライビングACモーター&ドライブ(ドライブACS): 閉ループフィードバックにより前進・後退運動を管理します。
-
I/Oモジュール(車両I/OコントローラーVMC20): 照明、ボタン、安全機能などのシステム機能を拡張します。
-
ハンドヘルドコントローラー(MCD8): セットアップ、テスト、または特別な場合に手動運転を可能にします。
このアーキテクチャは複数の構成に対応しており、 中程度の負荷の倉庫 標準的な通路幅を持つ倉庫に最適です。
2.2 二輪駆動式フォークリフトのアーキテクチャ
二輪駆動式フォークリフトには、前輪と後輪の2組のステアリング/駆動モーターがあります。この構成により:
-
高度な機動性: 横方向の移動や狭いスペースでの精密な旋回も可能です。
-
重荷物への適応性: 高密度保管や狭い通路での運用にも適しています。
-
複雑な制御システム: 複数軸およびセンサーのフィードバックのために追加のCANOPENデバイスを必要とする。
デュアルステア式フォークリフトは、しばしば 産業および製造環境において、柔軟性と精度が極めて重要である。
3. フォークリフトAGV向けナビゲーション技術
正確なナビゲーションは、AGVが自律的に稼働するために不可欠である。現在のナビゲーション技術には、 レーザーナビゲーション、磁気ナビゲーション、誘導ワイヤーによるナビゲーション、およびQRコードナビゲーションが含まれる。.
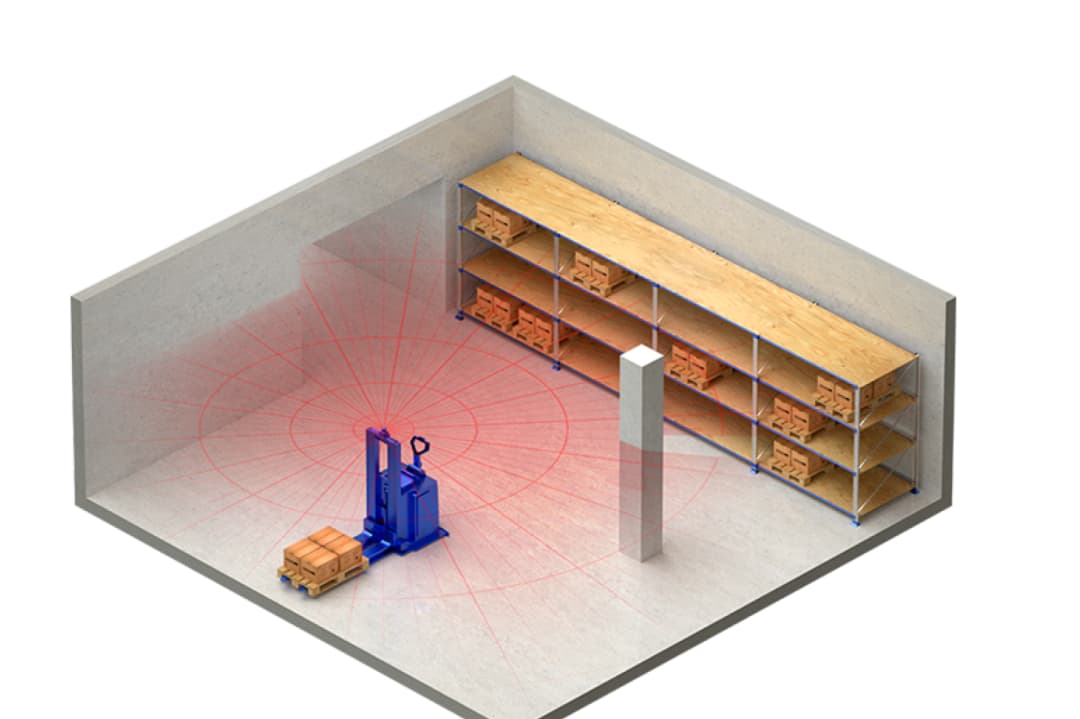
3.1 レーザーナビゲーション
レーザースキャナーは、反射板または倉庫の輪郭を検出して位置決めを行う:
-
反射板ベースのナビゲーション: 固定された場所に設置された反射板を使用する。最新の反射板ナビゲーション2.0では、反射板がわずか2つで済むため、設置作業が軽減される。
-
ナチュラルナビゲーション: 環境の自然な輪郭を利用する。反射板は不要だが、倉庫のレイアウトが動的に変化すると精度に影響が出る可能性がある。
レーザーナビゲーションは、 大規模な倉庫や製造フロア 一貫した精度が求められる場所において。
3.2 磁気ナビゲーション
-
磁気ペグナビゲーション: 床に埋め込まれた磁気ペグをセンサーが検出する。反射板が使用できない環境に適している。
-
磁気テープナビゲーション: 連続した磁気経路がAGVをガイドする。テープ上の四角い磁気ブロックが縦方向の更新情報を提供する。 限られたスペースや屋外エリア.
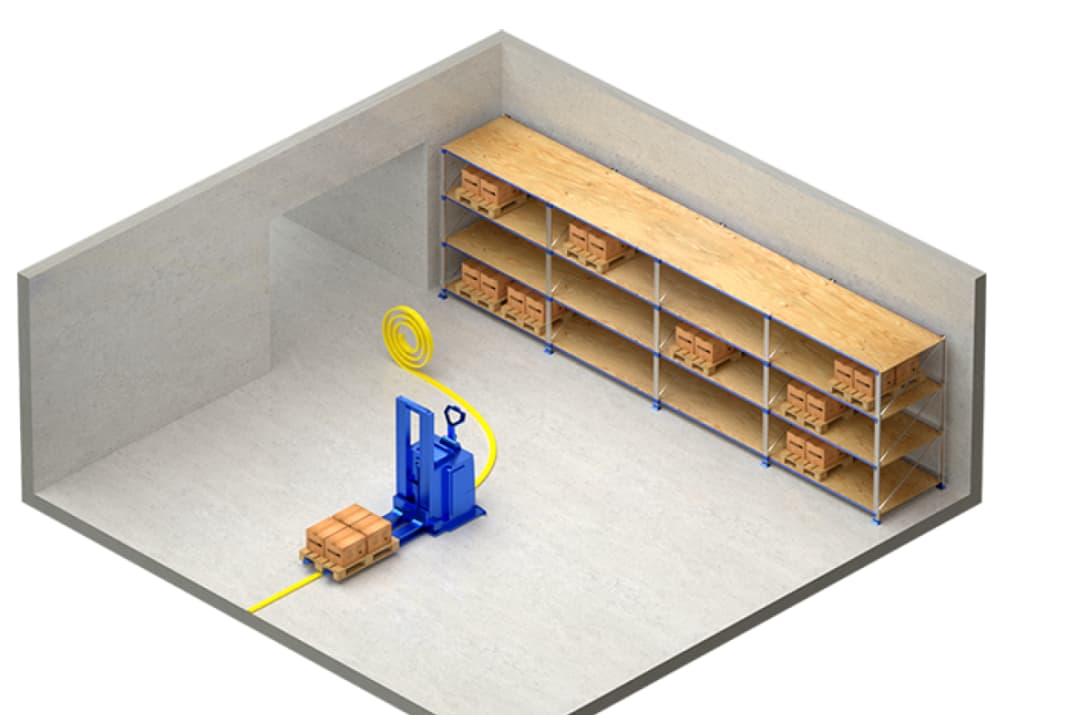
3.3 誘導ワイヤーによるナビゲーション
誘導ワイヤーによるナビゲーションは、地下に埋設された通電ワイヤーを電磁センサーで検出する。伝統的で設備投資が大きいものの、 マーカーのない環境でも連続的な位置決めが可能である。.
3.4 QRコードナビゲーション
QRコードナビゲーションは、床に設置されたQRコードをスキャナーで読み取る。この方法は、 eコマースおよび病院物流において、以下のような利点を提供する:
-
高い柔軟性: QRコードは容易に移設できる。
-
動的な適応性: 倉庫のレイアウトが変更されても、経路の再設計が簡単である。
-
総合的な精度: IMUとエンコーダーのフィードバックを活用して高精度を実現する。
4. AGVナビゲーションの今後のトレンド
4.1 人工マーカーの削減
現在のトレンドは、 マーカーなしのナビゲーション レーザースキャナーやビジョンシステムを使用する。反射板やその他のマーカーを削減することで、設置が簡素化され、保守コストも低減される。さらに、 ハイブリッドナビゲーション2.0 複数のナビゲーション手法を統合し、倉庫の各ゾーンに最も適したシステムを動的に選択する。
4.2 ハイブリッドナビゲーションシステム
ハイブリッドナビゲーションにより、ナビゲーション方式間のシームレスな切り替えが可能になる:
-
広い通路: 反射板ナビゲーションまたはナチュラルナビゲーションを使用する。
-
狭い通路や高密度保管: 磁気ナビゲーションまたはQRコードナビゲーションに切り替える。
このアプローチは、 運用効率を最適化し、人工マーカーへの依存を低減し、複雑な倉庫レイアウトにおける適応性を向上させる。
5. AkurosフォークリフトAGVの優位性
-
スケーラブルなソリューション: 小規模な倉庫から大規模な工業施設まで対応可能。
-
高い柔軟性: 複数のナビゲーション方式と車両構成に対応。
-
安全第一: 内蔵センサー、バンパー、緊急システムにより、作業員と貨物を保護する。
-
エネルギー効率: 最適化されたモータ制御により消費電力を削減。
-
将来に備えた設計: 倉庫管理システムやIoTとの統合に対応。
6. 実用的な応用例
-
eコマースフルフィルメントセンター: 迅速なピッキングと補充。
-
製造工場: 原材料および完成品の自動搬送。
-
冷蔵保管: 繊細な在庫管理のための高精度ナビゲーション。
-
病院・医療物流: 安全で清潔、かつ信頼性の高い自律搬送。
AGVを導入することで、組織は 人手依存を低減し, 処理能力を向上させ、さらに 倉庫スペースのより効率的な活用を実現します.
結論
フォークリフト型AGVは、 現代の倉庫自動化の不可欠な要素です、精密さ、安全性、そして拡張性を提供します。高度な制御システム、多様なナビゲーション技術、モジュール式設計により、AGVは生産性を向上させ、運用コストを削減し、将来にわたる倉庫業務の持続可能性を確保します。
AGVへの投資は もはや選択肢ではなく、 急速に進化する物流環境において競争力を維持するための戦略的決断です.